
These are the resources that support this Florida Standard.
MAFS.912.G-CO.2.7: Use the definition of congruence in terms of rigid motions to show that two triangles are congruent if and only if corresponding pairs of sides and corresponding pairs of angles are congruent.
There are 35 resources.| Title | Description | Thumbnail Image | Curriculum Topics |
|---|---|---|---|
Math Definitions Collection: Geometry Theorems and Postulates |
|
Definition of a Triangle, Definition of an Angle, Right Triangles and Definition of a Line | |
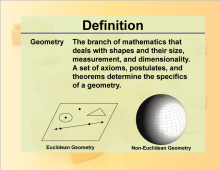
Math Definitions Collection: Geometry |
|
3-Dimensional Figures, Definition of an Angle, Exploring Coordinate Systems, Geometric Constructions with Points and Lines, Definition of a Point, Definition of a Triangle, Definition of a Circle, Definition of Transformations, The Distance Formula, Definition of a Polygon, Definition of a Plane, Definition of a Line, Midpoint Formula, Applications of Polygons, Right Triangles, Trig Expressions and Identities, Definition of a Quadrilateral, Applications of Points and Lines, Proportions, Area and Perimeter of Triangles, Area and Perimeter of Quadrilaterals and Pyramids | |
Math Clip Art Collection: Triangles |
Overview |
|
Applications of Coordinate Geometry, Applications of Triangles, Definition of a Triangle and Right Triangles |
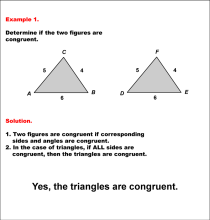
Math Examples Collection: Congruent Triangles |
|
Definition of a Triangle | |
Math Examples Collection: Analyzing Congruent Shapes |
|
Definition of a Triangle | |
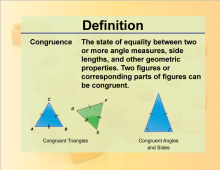
Definition--Geometry Basics--Congruence |
Definition--Geometry Basics--CongruenceThis collection of clip art images includes image sequences for key topics in geometry. This includes points, lines, planes, angles, triangles, quadrilaterals, and polygons. Each sequence of images provides an overview of the topic. Note: The download is a PNG file. |
|
Definition of Transformations |
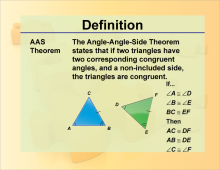
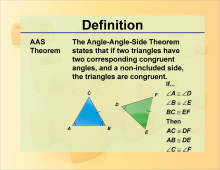
Definition--Theorems and Postulates--AAS Theorem |
Definition--Theorems and Postulates--AAS TheoremThis is part of a collection of definitions of geometric theorems and postulates. |
|
Definition of a Triangle |
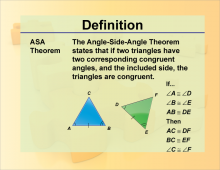
Definition--Theorems and Postulates--ASA Theorem |
Definition--Theorems and Postulates--ASA TheoremThis is part of a collection of definitions of geometric theorems and postulates. |
|
Definition of an Angle |
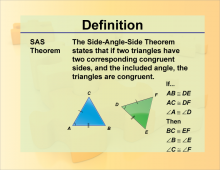
Definition--Theorems and Postulates--SAS Theorem |
Definition--Theorems and Postulates--SAS TheoremThis is part of a collection of definitions of geometric theorems and postulates. |
|
Definition of a Triangle |
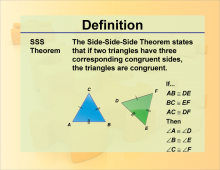
Definition--Theorems and Postulates--SSS Postulate |
Definition--Theorems and Postulates--SSS PostulateThis is part of a collection of definitions of geometric theorems and postulates. |
|
Definition of a Triangle |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Congruent--Labeled |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Congruent--LabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Congruent--Unlabeled |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Congruent--UnlabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Non Congruent--Labeled |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Non Congruent--LabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Similar--Labeled |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Similar--LabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Similar--Unlabeled |
Math Clip Art--Triangles--Two Triangles Share Vertical Angles Similar--UnlabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles with Common Base--Congruent--Labeled |
Math Clip Art--Triangles--Two Triangles with Common Base--Congruent--LabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles with Common Base--Congruent--Unlabeled |
Math Clip Art--Triangles--Two Triangles with Common Base--Congruent--UnlabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
Math Clip Art--Triangles--Two Triangles with Common Base--Non Congruent--Labeled |
Math Clip Art--Triangles--Two Triangles with Common Base--Non Congruent--LabeledThis is from a collection of triangular shapes. They come labeled and unlabeled. |
|
Applications of Triangles |
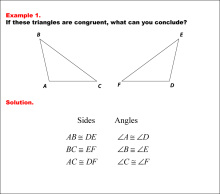
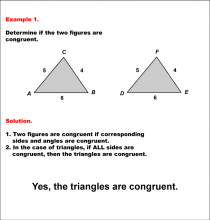
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 1 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 1This is part of a collection of math examples that focus on geometric shapes. |
|
Definition of a Triangle |
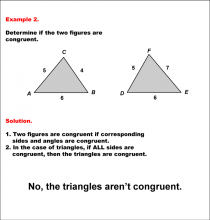
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 2 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 2This is part of a collection of math examples that focus on geometric shapes. |
|
Definition of a Triangle |
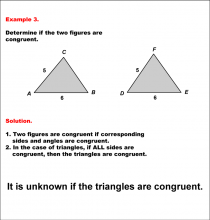
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 3 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 3This is part of a collection of math examples that focus on geometric shapes. |
|
Definition of a Triangle |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 4 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 4This is part of a collection of math examples that focus on geometric shapes. |

|
Definition of a Triangle |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 5 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 5This is part of a collection of math examples that focus on geometric shapes. |

|
Definition of a Triangle |
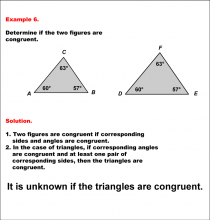
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 6 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 6This is part of a collection of math examples that focus on geometric shapes. |
|
Definition of a Triangle |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 7 |
Math Example--Geometric Shapes--Analyzing Congruent Shapes--Example 7This is part of a collection of math examples that focus on geometric shapes. |

|
Definition of a Triangle |
Join the hundreds of thousands of math educators who have used Media4Math resources in their classroom to engage their students. Our new integrated Library/Classroom product has everything you need!

About Media4Math
Our Mission
Media4Math's mission is to educate 21st-century students in real-world applications of math with digital technology. We bring math to life in your classroom with a rich blend of resources to inspire your students to learn. Our philosophy is that the procedural side of math is a prerequisite to using it, but we also find that real-world math applications can provide motivation and even inspiration for math students. Math is its own language and it has important stories to tell. While many of our resources are for procedural skills, there are many resources that are real-world applications of math. Some of these resources rely on partnerships with other educational publishers.

About Media4Math Library
Media4Math Library contains over 15,000 high-quality resources designed for classroom or home use. This includes instructional, remediation, and assessment resources. You'll find truly innovative resources that bring math to life. Resources in Media4Math Library include:
- Videos
- Math Clip Art
- Math Examples
- Quizzes
- Tutorials
- PowerPoint and Google Slide presentations
- GoogleEarth Voyager Stories
- Algebra Applications
- Geometry Explorations
- Quizlet Flash Cards
- Desmos Resources
- Texas Instrument Resources
- Games and Simulations
About Media4Math Classroom
Media4Math Classroom provides ready-to-use interactive math lessons that teach, assess, and provide real-world applications of topics in Pre-Algebra, Algebra, and Geometry. Assign these modules to your students and capture assessment scores in an easy-to-use Dashboard. This is a growing library of instructional modules. Topics include:
- Arithmetic
- Pre-Algebra
- Algebra
- Geometry
- SAT Math Prep
Media4Math Classroom modules provide real world applications of math that will motivate your students. Here are some examples:
- Construction Site Math. Apply ratios and proportions to mixtures of cement and concrete. This module includes video resources and your students will get a real-world application of ratios and proportions.
- Counting Bison. Apply place value concepts to the real-world application of the bison population. Because the bison population has gone through dramatic changes in population, this become an opportunity to use and apply place value.
- Wildlife Refuge. This study of area and perimeter centers on the mustang population in the Nevada area. Students explore the relationship between area and perimeter of rectangular shapes in the context of designing a wildlife refuge.
The Media4Math Bundle
A subscription to the Media4Math bundle gives teachers access to all the resources listed above. Specifically:
- Access to all the Media4Math Library resources and tools.
- Access to all the Media4Math Classroom instructional modules.
To learn more about our subscription packages, contact us at admin@media4math.com.
Partnering with Media4Math
Media4Math prides itself on its strategic partnerships with other educational organizations. Our partnerships include the following partners:
-
Google Earth. Media4Math has partnered with GoogleEarth to create a comprehensive library of GoogleEarth Voyager Stories. These map-based explorations of geometry, geography, and culture will literally bring the math to life. See our collection of Voyager Stories by clicking on this link to the Google Earth resources.
-
Texas Instruments. TI is the leading provider of graphing calculators used in the classroom. Media4Math has partnered with TI to create a library of digital resources to support the use of these graphing calculators. These resources include videos, presentations, and related tutorials. See our collection of TI resources by clicking on this link to the TI resources.
-
Desmos. This free online resource that includes a graphing calculator and geometry tools. Media4Math has created an extensive library of resources that support the use of these Desmos resources. See our collection of Desmos resources by clicking on this link to the Desmos resources.
- Quizlet. We have partnered with the leading provider of interactive Flash Cards and is used by millions of teachers and students around the world. Media4Math has developed an extensive library of Quizlet resources. See our collection of Quizlet resources by clicking on this link to the Quizlet resources.
Link to the Media4Math Study Sets on Quizlet and search for "Media4Math."
- The Princeton Review. The Princeton Review is the leading provider of SAT prep and other test preparation courses and tutorials. Media4Math is an affiliate of Princeton Review and we have created a set of free SAT math resources, sponsored by Princeton Review. See this collection of SAT resources by clicking on this link to the Princeton Review resources.
If you would like to partner with Media4Math, please reach out to us at admin@media4math.com.